
Großbrand in einer Fabrikhalle, die Rettungskräfte sind vor Ort. Sie schicken Roboter nacheinander in das Gebäude, die sich im Innern in einer Linie oder Gitterstruktur positionieren, um eine Kommunikationsinfrastruktur aufzubauen. Mit ihren Sensoren untersuchen sie die Umgebung. Die gesammelten Informationen senden sie nach draußen an die Leitstation der Einsatzkräfte, damit diese sich ein genaueres Bild vom Einsatzort machen und effizienter handeln können.
Damit Roboter in einem solchen Rettungsszenario ressourceneffizient und robust funktionieren, entwickelt Dr.-Ing. Mario Porrmann, Leiter der Fachgruppe Schaltungstechnik im Heinz Nixdorf Institut der Universität Paderborn, mit seinem Team mikroelektronische Komponenten und Systeme. „Das Besondere in diesen sogenannten mobilen Ad-hoc-Netzwerken ist, dass es keine feste Infrastruktur mit Sendemasten gibt wie bei der Handykommunikation. Hier bilden die Roboter die Sendestationen. Sie müssen, damit das Netzwerk funktioniert, immer miteinander in Kontakt bleiben. Dazu braucht man Protokolle, die gewährleisten, dass sich die Roboter nicht zu weit voneinander entfernen“, beschreibt Porrmann.
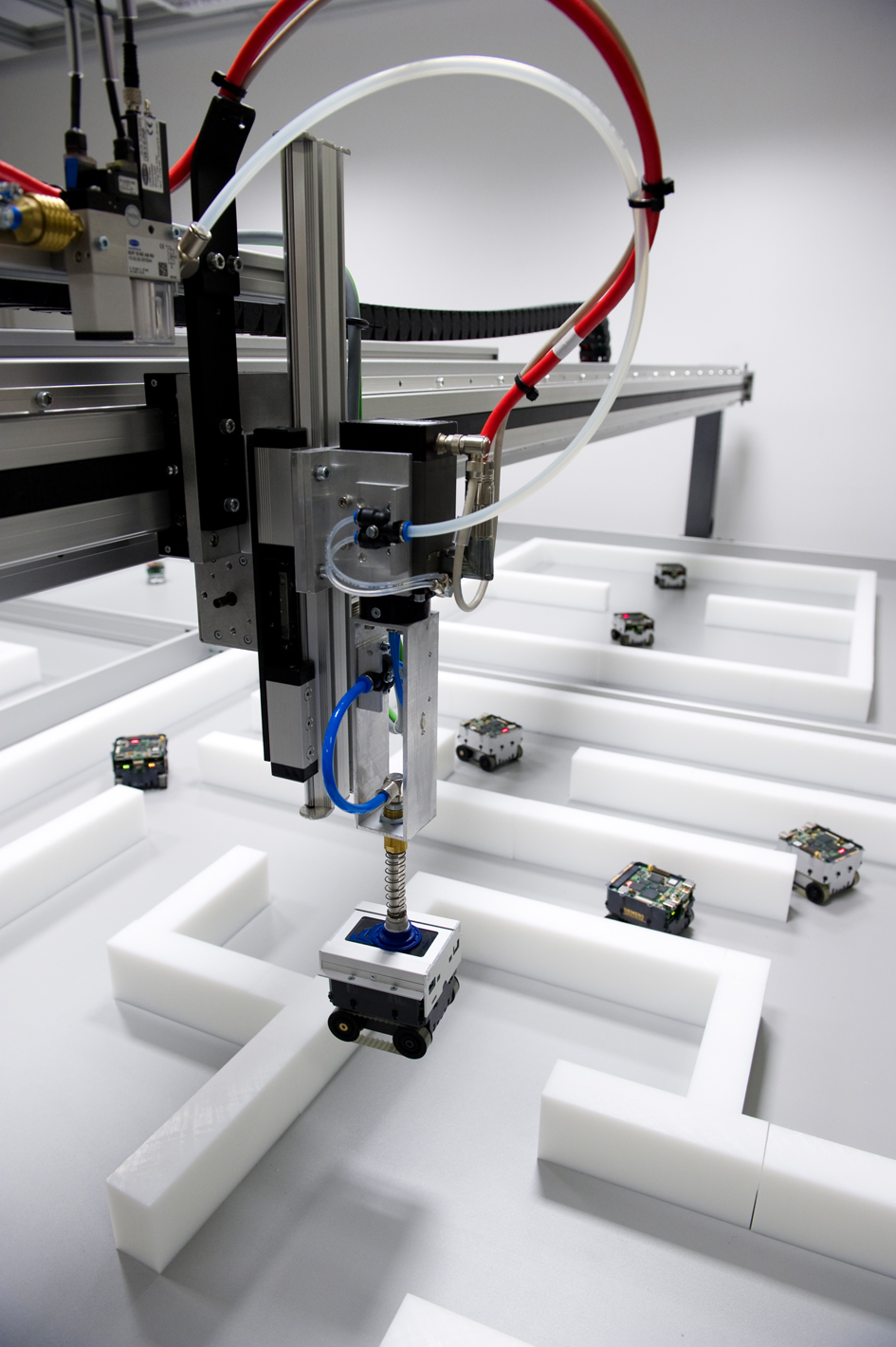
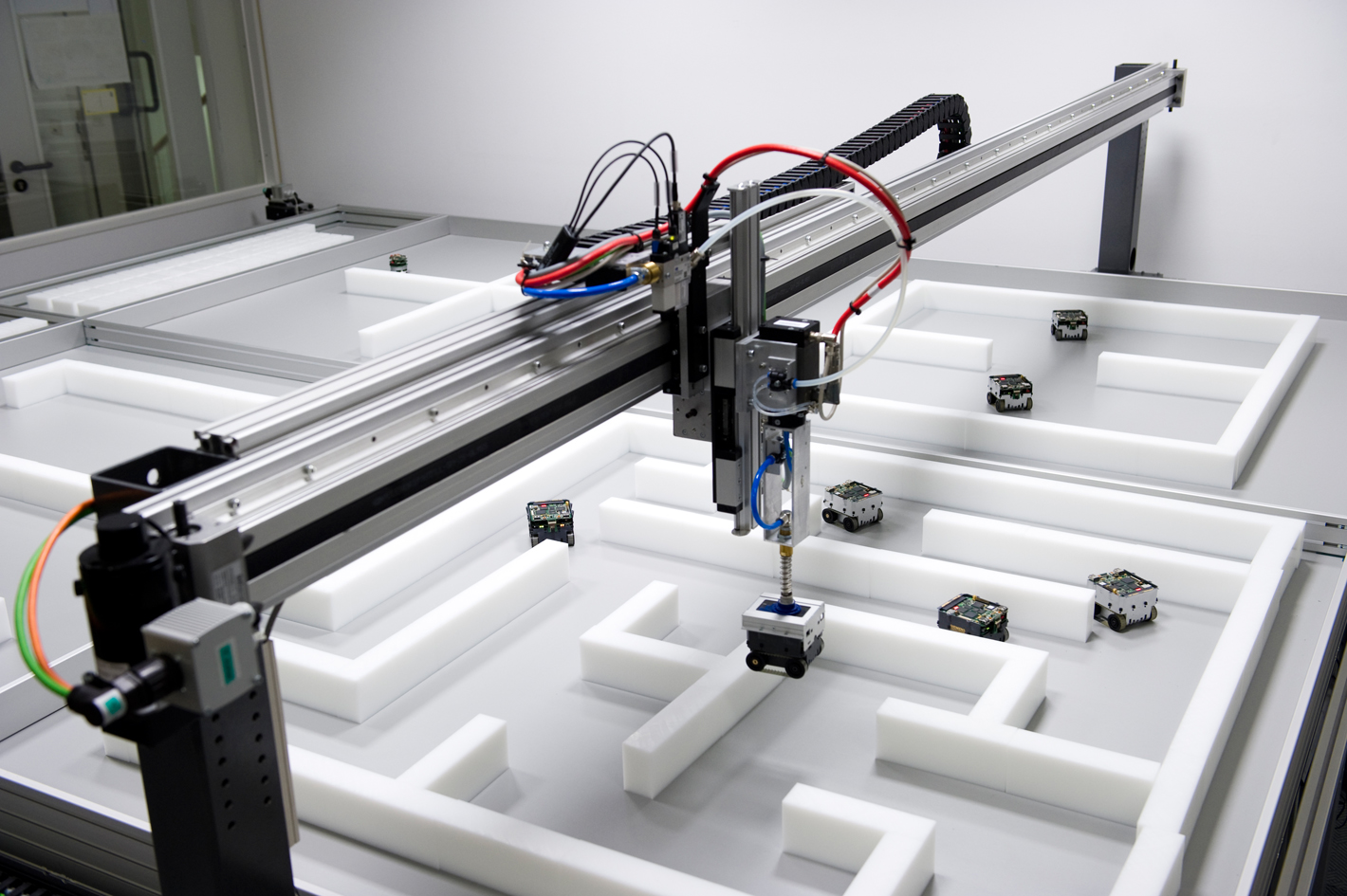
Das Verhalten der Roboter wird mit Algorithmen programmiert und am Computer simuliert. Dann muss sich die Entwicklung in der Praxis bewähren. In der Realität beeinflussen Faktoren wie Wärme, Fahroberfläche oder das Fahrverhalten der Roboter den Verlauf des Experiments. Im Robotiklabor des Heinz Nixdorf Instituts wurde mit Unterstützung der Deutschen Forschungsgemeinschaft eine Telewerkbank installiert, eine Experimentierplattform für Multi-Roboter-Experimente. Sie besteht aus einer 3,6 m x 3,6 m großen Arbeitsfläche, die sich in vier unabhängige Quadrate einteilen lässt und Raum für bis zu 64 kleine Roboter, die BeBots, bietet. Jedes Quadrat wird durch eine an der Decke angebrachte Videokamera überwacht, deren Daten an einen Videoserver übertragen und zur Erfassung der Position der BeBots genutzt werden. Ein fest installierter Roboter mit Greifarm kann mit weißen Quadern unterschiedliche Szenarien, also Teststrecken für die Miniroboter aufbauen. Rund um die Arbeitsfläche befindet sich eine Vielzahl von Rechnern, die die Steuerung und Überwachung der Experimente gewährleisten.
„Auf der Telewerkbank können Experimente mit Robotern in einer kontrollierten Umgebung durchgeführt werden. Durch die Nutzung eines Greifarmroboters beim Aufbau, ist die Versuchsumgebung immer exakt gleich, also reproduzierbar. Funktioniert ein Experiment mit den Minirobotern nicht so, wie es sich der Forscher vorab überlegt und am Computer simuliert hat, kann er den Algorithmus verändern, die Roboter neu programmieren und das Experiment in der exakt gleichen Umgebung nochmals ablaufen lassen, um zu testen, ob es dann besser funktioniert. Und die Telewerkbank kann durch Wissenschaftler, die nicht vor Ort sind, über das Internet genutzt werden“, erläutert Mario Porrmann.
Forschungsschwerpunkt der Paderborner Forscher ist die Entwicklung von Mikroelektronik für Szenarien, in denen eine Vielzahl von Robotern miteinander kommuniziert. Dazu zählt neben dem Rettungsszenario auch die Untersuchung von Fluchtverhalten: Eine Menschenmenge, auf der Telewerkbank dargestellt durch viele Roboter, befindet sich in einem geschlossenen Raum, der nur eine Fluchtmöglichkeit bietet. Versuchen alle gleichzeitig, die rettende Öffnung zu erreichen, schaffen es nur wenige. Stellen sie sich jedoch in einer Schlange auf, hat sich der Raum in kurzer Zeit geleert. Ein weiteres Beispiel ist das Kreuzungsmanagement. Hier werden Lösungen entwickelt, die das rasche und kollisionsfreie Durchfahren einer Kreuzung ohne Ampel ermöglichen.
Die Paderborner Forscher nutzen dafür vorhandene Algorithmen, für manche Szenarien werden auch eigene entwickelt. Sind Simulation und Experiment erfolgreich verlaufen, werden mikroelektronische Baugruppen bzw. Bausteine entwickelt, die eine ressourceneffiziente und kostengünstige Lösung bieten. Diese werden extern hergestellt und im Heinz Nixdorf Institut in die Roboter integriert. „Wir gelangen über die Anwendung zur Systemintegration. Diese Entwicklungstiefe gibt es in der universitären Forschung heute selten“, sagt Mario Porrmann.
„Mit der Telewerkbank haben wir eine leistungsfähige Infrastruktur, die es uns ermöglicht, auch mehrere Experimente gleichzeitig in den vier Sektoren durchzuführen “, fasst Porrmann zusammen: „Und sie erleichtert uns die Zusammenarbeit mit unseren wissenschaftlichen Kollegen, die nicht vor Ort sind“.


{kind=link}
{kind=link}